一种专网通信设备下的UWB&蓝牙融合定位方案研究-真源科技
|
|
|
引言
当前。化工总产值占世界总量的40%,预计2030年将达到50%。化工生产过程复杂多样,涉及的物料易燃易爆,有毒有害,生产条件多高温高压,低温负压,现场危险化学品储存量大,危险远集中。与此同时,化工(危险化学品)企业(以下简称危险化学品企业)重特大事故多发,传统安全风险管控手段“看不住、管不住、管不好”等问题突出。随着新一代信息技术的兴起,依靠物联网、大数据、云计算、人工智能(AI )、5G等新兴技术,建设危险化学品企业安全风险智能化管控平台,加强在感知、监测、预警、处置、评估等环节赋能危险化学品企业破解企业,破解安全生产的痛点、难点、堵点问题,是实现危险化学品企业转型升级的必由之路。
为认真贯彻习近平总书记关于危险化学品和工业互联网发展应用的重要指示精神和党中央、国务院有关决策部署,落实《“工业互联网+安全生产”行动计划(2021-2023年)》和《“工业互联网+安全生产”试点建设方案》工作安排,有效指导全国危险化学品企业安全风险管控数字化转型智能化升级,中华人民共和国应急管理部于2022年1月发布了《危险化学品企业安全风险智能化管控平台建设指南(试行)》文稿,要求各地应急管理局遵照执行。其中,明确要求“工业互联网+安全生产”建设项目需要建设智能能源定位管理系统,并要求使用新型无线电技术为基础的新型定位方案。本次研究及根据不同场景使用一种或者多种融合定为技术来实现定位。
|
|
一、系统设计及定位算法
1、系统设计 融合定位的整体系统由提供定位底层数据的定位信标、接收及上传定位信息的融合定位标签、数据中转的定位基站、处理标签定位信息及计算定位坐标的定位平台四个部分组成,框图如图1所示: 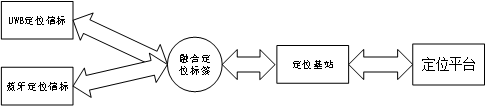
图1:融合定位系统框图
其中,负责UWB定位的是DecaWave公司的DW1000芯片,主要功能就是记录收发信息的时间戳及通信处理;定位基站不仅可以向定位平台通过4G或者网络发送标签的定位信息,同时也可以向标签通过LORA发送一些平台的配置及报警信息。
标签工作时,会开启扫描蓝牙及UWB信号的时间窗口,当同时收到蓝牙和UWB的信标数据时,标签会根据当前的底层数据信息自动选择蓝牙定位或者UWB定位,定位方式的灵活切换带来的是应用场景的灵活配置,能有效满足不同用户及场景需求。 2、定位算法 无线定位系统的定位方法主要分为基于信号接收强度法(RSSI)、基于信号到达角度法(AOA)、基于接收信号时间法(TOA)、基于信号到达时间差法(TDOA)等。本文主要使用TOA法。TOA法的常见的有三点定位法和Chan算法,三点定位法对与底层的定位数据要求较高,而Chan氏算法不仅可以应用于基于TOA的定位方法,还可以应用与基于TDOA的定位方法中,所以应用较广且对环境的适应性更强。 Chan算法是一种利用MAX似然估计法进行坐标位置预测的方法,当无线定位设备的底层定位测量数据误差服从高斯分布时,该算法定位精度高且计算量较小,以三基站为例对Chan算法进行分析。 设存在三个基站S₁(X₁,Y₁),S₂(X₂,Y₂),S₃(X₃,Y₃),待定位目标位置坐标为(x,y),根据空间几何学可以得到:  其中,待测目标到三个基站间的距离为: 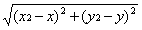 由公式1-1可以得到如下结果: 
上式经变换可以得到等式:

令
 通过简化上式可以得到: 通过简化上式可以得到:
将上式整理成矩阵的形式:

其中,矩阵
 , , , , , , , , , , ,c表示电磁波速, ,c表示电磁波速, 表示目标节点到达各个基站的时刻,那么目标的坐标可以表示为: 表示目标节点到达各个基站的时刻,那么目标的坐标可以表示为:
二、卡尔曼滤波算法
当对待测目标节点进行跟踪和定位时,由先验知识可知定位的轨迹是平滑的,待测目标节点当前时刻的状态和上一时刻的状态有关联。通过这些先验知识我们就能够得到更加准确的待测目标节点的位置信息。而卡尔曼滤波正是高斯过程优滤波的一种非常有效的方法,具有较好的跟踪性能。当所建立的对象运动模型和实际对象的运动模型足够匹配且系统状态和参数不发生突然改变时,它能够通过当前观测量和先前观测信息,按照线性小方差理论,得到待测目标节点位置的优估值,性能表现较好。
卡尔曼滤波器分为预估和校正两个过程。预估期间对当前状态进行预测,并对当前优状态变量以及误差协方差进行预估得到下一时刻状态,构造先验预估值;在校正阶段,主要是根据测量更新方程的先验状态估计值和当前时刻的测量信息对当前状态进行后验估计,下面分别为离散卡尔曼滤波时间更新方程和状态更新方程。 时间更新方程如下:  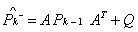 其中,A表示状态变换矩阵,B为输入控制矩阵,  为先验估计的状态矩阵, 为先验估计的状态矩阵, 为上一时刻状态的估计误差协方差矩阵,Q表示n*n过程噪声协方差矩阵, 为上一时刻状态的估计误差协方差矩阵,Q表示n*n过程噪声协方差矩阵, 为n*n先验估计误差协方差矩阵。 为n*n先验估计误差协方差矩阵。方程1-8主要是根据上一时刻状态和外部作用估计出当前时刻的状态,方程1-9是利用上一次计算得到的估计误差协方差和过程噪声协方差预测当前的估计误差协方差矩阵。 状态更新方程如下: 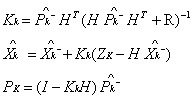 其中,H为m*n观测模型矩阵,它能够将真实的状态空间映射成观测的空间,R为m*m过程噪声协方差矩阵,  是卡尔曼增益,其大小反映了在优化状态值估计过程中“更相信”观测值 是卡尔曼增益,其大小反映了在优化状态值估计过程中“更相信”观测值 还是估计值 还是估计值 ,它可以使后验估计的误差协方差达到小。 ,它可以使后验估计的误差协方差达到小。
三、定位效果与分析
本文为验证定位系统的精度及稳定性,随机选取了一个室内办公环境及室外场景,分别对UWB及蓝牙的定位进行实验。下面分别介绍及分析两种定位效果。
1、UWB室内高精度定位 在一个长40米,宽16米的办公室内,随机选取了四个位置作为UWB信标的放置点。该环境下的人员流动及空间布局在测试时与正常工作环境一致。办公室的平面示意图如下所示: 
图二:UWB测试环境平面示意图
在该环境下,随机选取了10个位置作为融合定位标签的测试位置,每个点取100次测试结果,其测试结果如表1所示: 表1:UWB测试点定位结果误差表 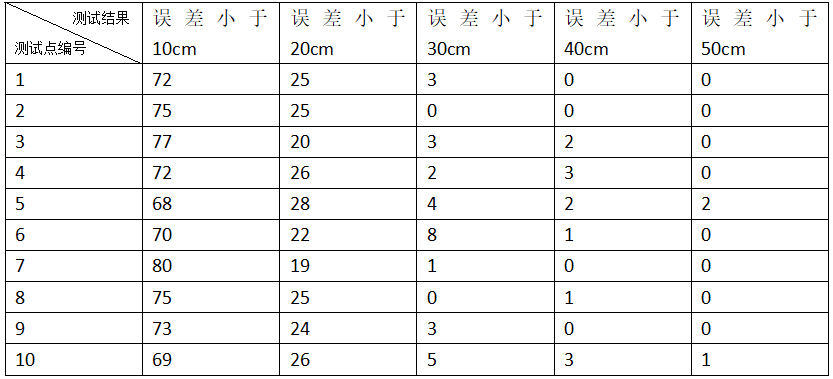 通过上表可以看出,在所有测试点中,误差小于10cm的占比基本稳定在70%左右,甚至可以达到80%;而误差小于30cmd的占比达到了95%以上。 综上,通过先进的硬件设计及定位平台系统,经过复杂的室内办公环境测试后可以得知:融合定位标签可以通过UWB获得定位误差在10~30cm以内的高精度定位效果,并且定位结果的稳定性较强,即使有某个异常点,也可以通过卡尔曼滤波算法来对结果进行校正。 2、蓝牙定位 蓝牙定位采用的是RSSI定位原理,为验证蓝牙定位效果,选取了某化工厂作为测试环境,如下图所示: 
图三:蓝牙信标测试安装环境示意图
图中绿框所示即为蓝牙信标的测试安装点,间隔在10~12米左右。 在该环境下,随机选取了10个位置作为融合定位标签的测试位置,每个点取100次测试结果,其测试结果如表2所示: 
表2:蓝牙测试点定位结果误差表
通过表二可以看出,蓝牙的定位精度虽然没有达到UWB的厘米级精度,但通过调整蓝牙信标的布置方案,可以做到即使在化工厂这种复杂的使用环境中,也基本可以保证3~5m的定位精度,足以满足绝大部分环境下的使用要求。
|
|
||||
|
 苏公网安备32021402002708
苏公网安备32021402002708